白黒サイクル
ロボットとジャグリングのブログ。
2007-01-21T00:08:09+09:00
シクロ 忍者ブログ
radenzaiku.blog.shinobi.jp://entry/347
2026-04-06T20:52:43+09:00
2026-04-06T20:52:43+09:00
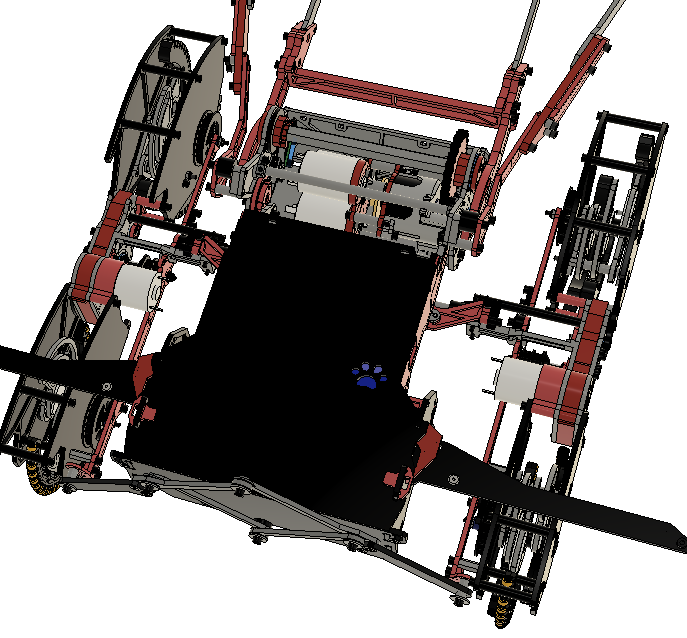
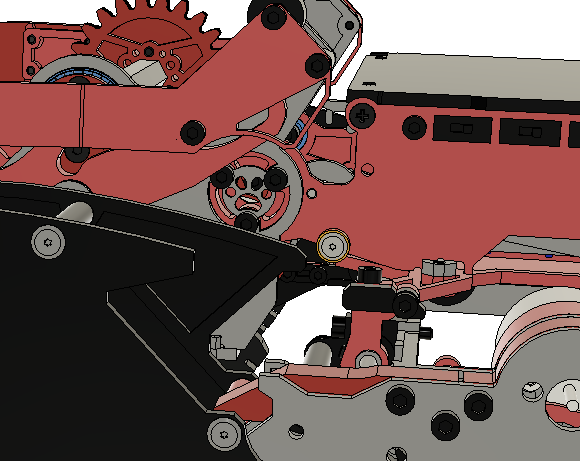
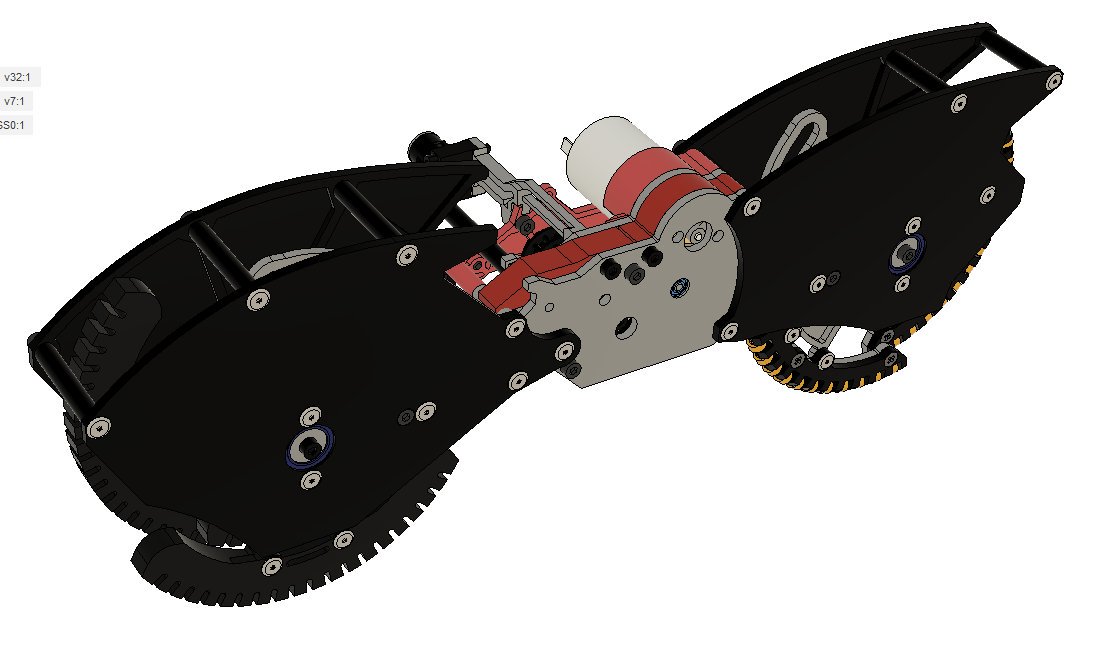
かわロボ からっ風ellipse 3Dデータ
何かの参考になれば。からっ風ellipse(2025)
シクロ
radenzaiku.blog.shinobi.jp://entry/346
2025-12-20T22:12:32+09:00
2025-12-20T22:12:32+09:00
遠征用の小型充電器を新調しました
https://adventar.org/calendars/11520 【選定条件】 【機器の選定】 ISDT PD60 Smart Charger : https://www.gforce-hobby.jp/products/GDT110.html PDケーブル : https://www.amazon.co.jp/dp/B0CGZLP3JR?ref=ppx_yo2ov_dt_b_fed_asin_title&th=1 PD充電器 : https://www.amazon.co.jp/dp/B0DM8WZB8M?ref=ppx_yo2ov_dt_b_fed_asin_title&th=1 【充電器の仕様】 【おまけ1】 https://hitecrcd.co.jp/products/x1nanousbplushitec/ 【おまけ2】 https://www.gforce-hobby.jp/products/G0318.html
シクロ
radenzaiku.blog.shinobi.jp://entry/345
2025-12-04T00:48:22+09:00
2025-12-04T00:48:22+09:00
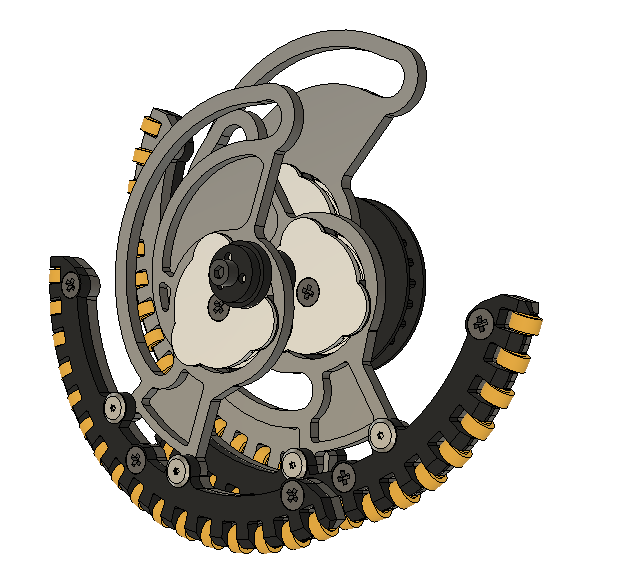
実用的な楕円歯車を作ってみた
https://adventar.org/calendars/11520 https://docs.google.com/presentation/d/e/2PACX-1vQofgYIQ3ERAQd45cG1n_BbJ9Z5t552_VAzDOLuq5TqrjS4tRscX4WIWNxstFKudkcY37In7mssxt1D/pub?start=false&loop=false&delayms=3000&slide=id.p https://docs.google.com/presentation/d/1kMXQo36jusGjTS1pbJR3cNzXiFpeDY_yWn2UXSLZuc4/edit?slide=id.p#slide=id.p https://www.originalmind.co.jp/goods/07944
シクロ
radenzaiku.blog.shinobi.jp://entry/344
2025-03-02T11:34:11+09:00
2025-03-02T11:34:11+09:00
Gearotic Motionによる楕円歯車設計1
https://adventar.org/calendars/8699 https://docs.google.com/presentation/d/e/2PACX-1vQofgYIQ3ERAQd45cG1n_BbJ9Z5t552_VAzDOLuq5TqrjS4tRscX4WIWNxstFKudkcY37In7mssxt1D/pub?start=false&loop=false&delayms=3000&slide=id.p
シクロ
radenzaiku.blog.shinobi.jp://entry/343
2025-02-02T01:47:57+09:00
2025-02-02T01:47:57+09:00
無題
↓この場所です。
シクロ
radenzaiku.blog.shinobi.jp://entry/342
2025-01-01T18:26:44+09:00
2025-01-01T18:26:44+09:00
からっ風SS 2024年版
スライダリンクの設計方法 過去の作例 タケフレックスBRUSH を使用しました。ウレタン用顔料 を買って使いました。PA11(MJF) でテストしました。シリコンシーラントの足裏 、ウレタンゴムの足裏
シクロ
radenzaiku.blog.shinobi.jp://entry/341
2023-12-25T22:52:34+09:00
2023-12-25T22:52:34+09:00
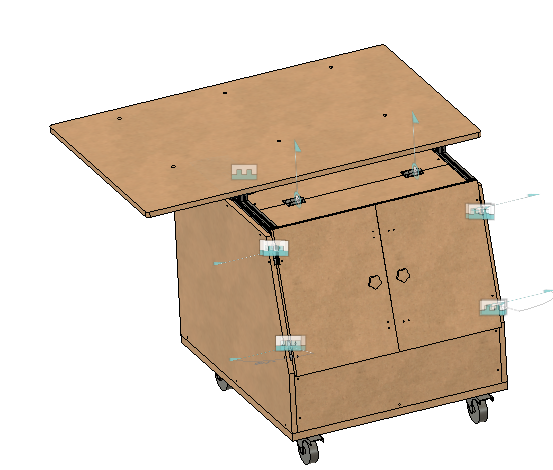
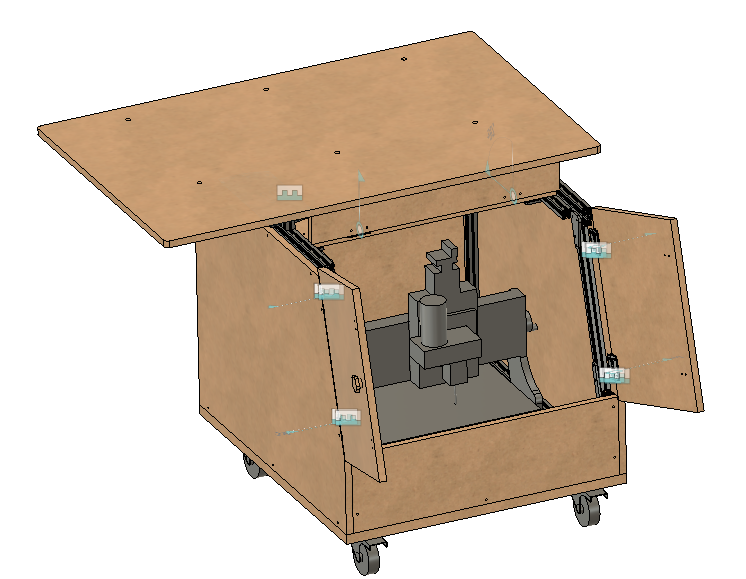
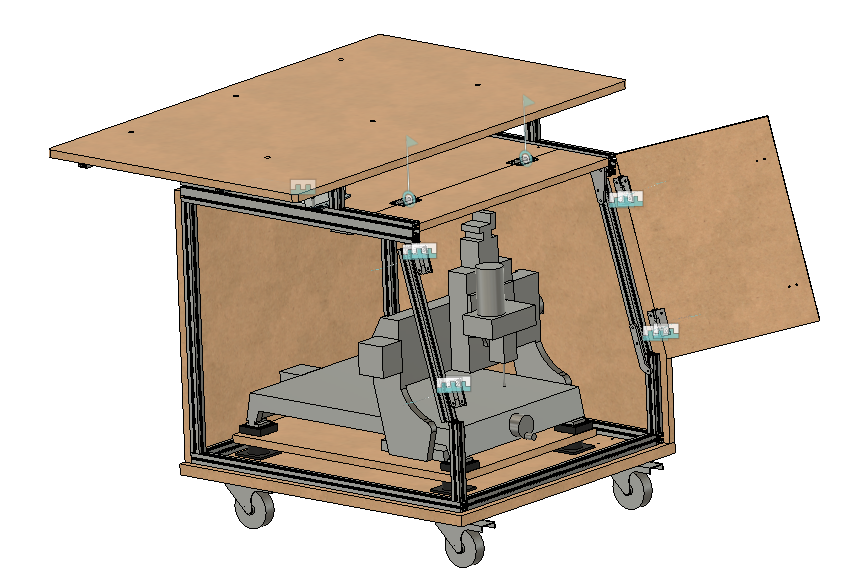
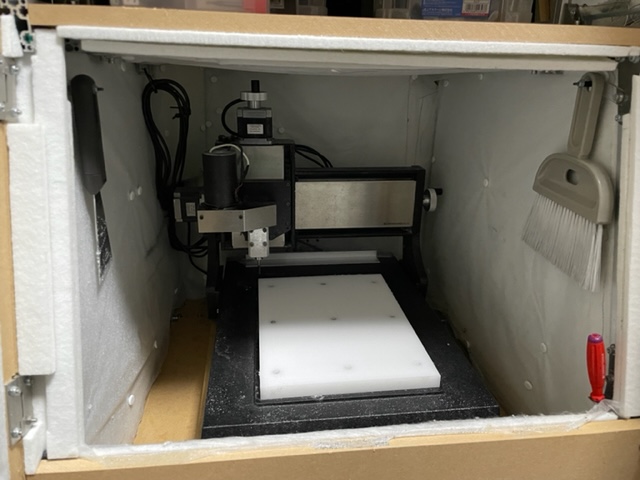
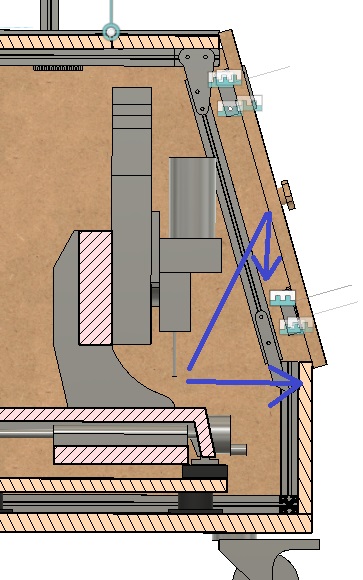
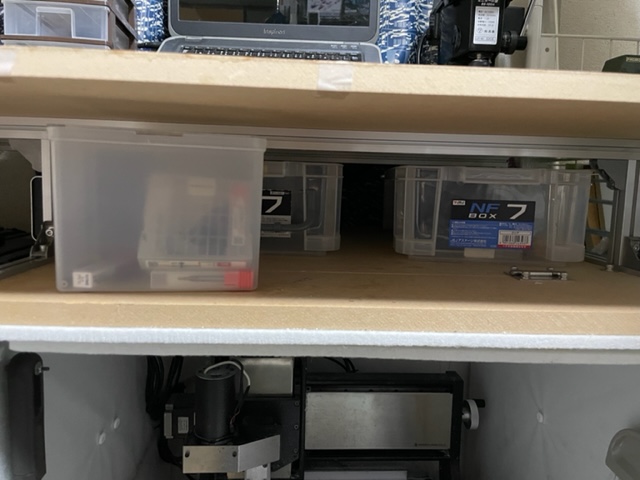
CNCの防音BOX
作ったのは2021年の話ですが、そこから2年くらい放置気味でした。①防音性能 amazonの製品ページ ※amazonなのでリンクが変わる可能性があります②切粉が飛び散るのを防ぐ ③作業台が欲しい ④吸音材に切粉が付かないようにする 加工について https://www.storio.co.jp/howtodiy/howto_plan 結果 3Dデータ CNC防音BOX.iges
シクロ
radenzaiku.blog.shinobi.jp://entry/340
2022-09-04T17:01:55+09:00
2022-09-04T17:01:55+09:00
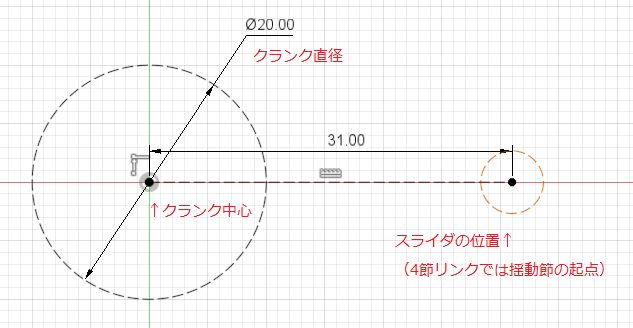
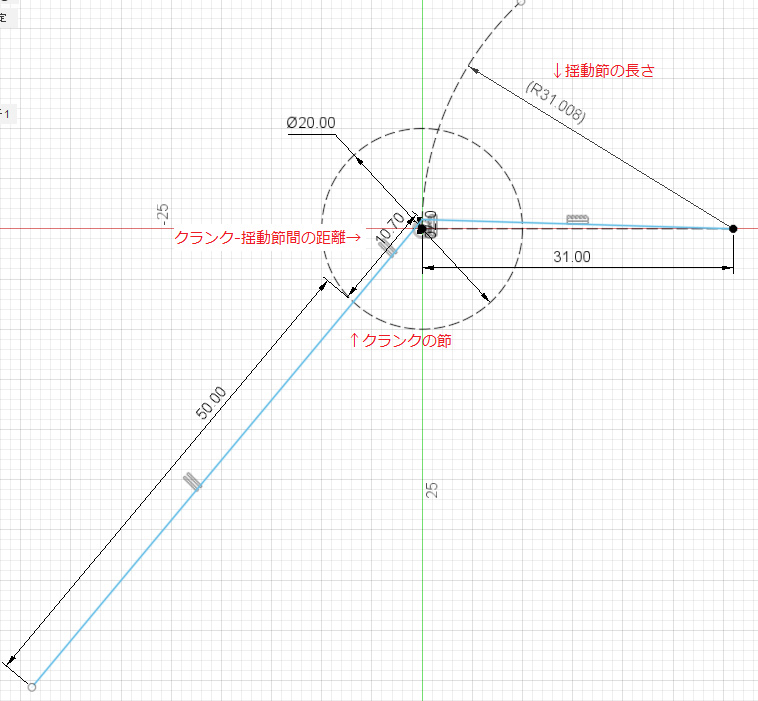
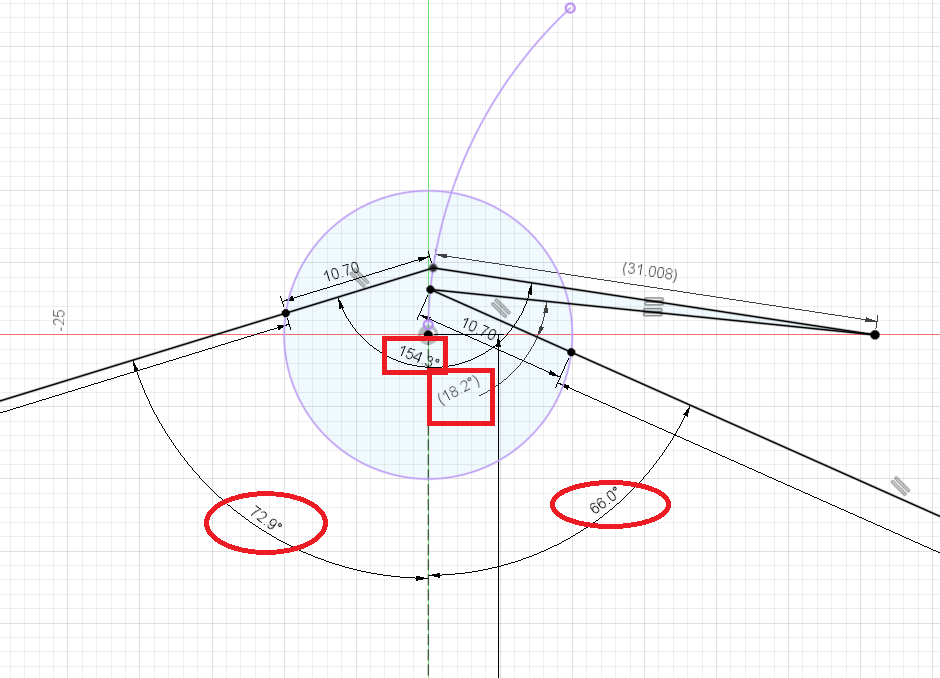
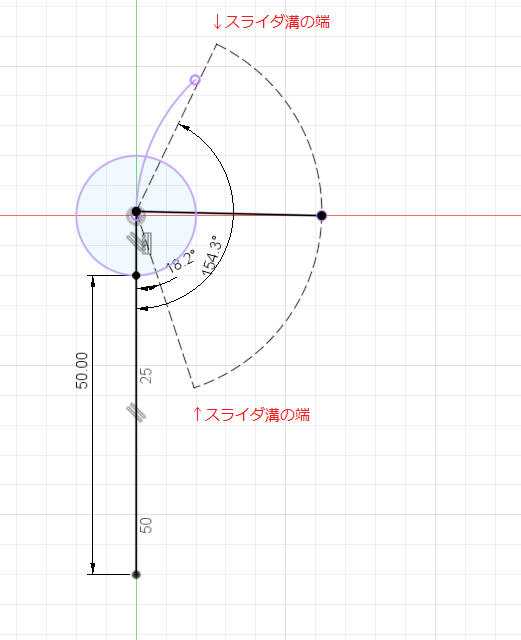
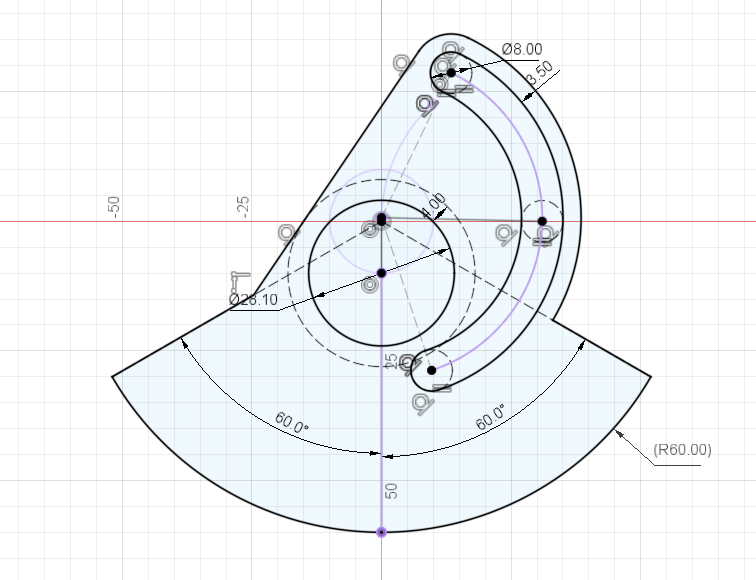
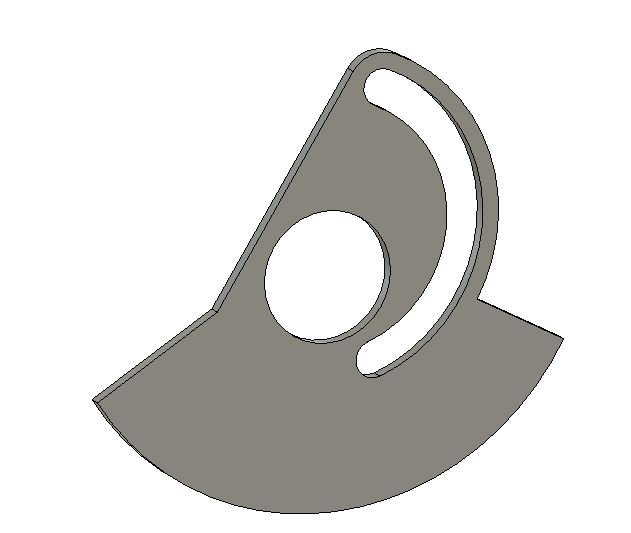
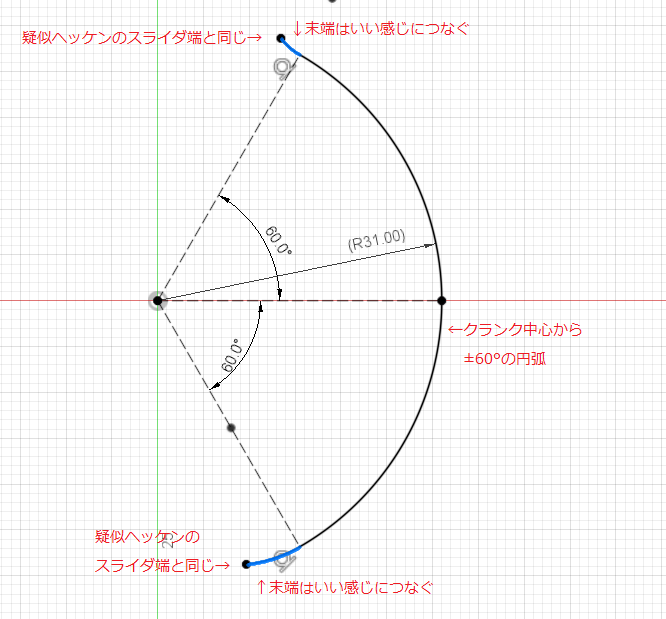
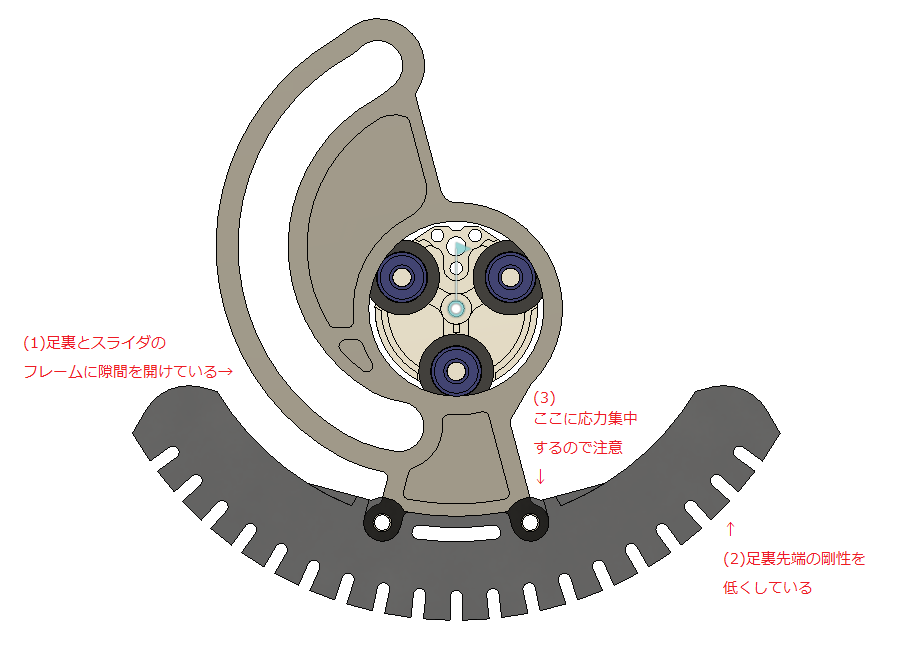
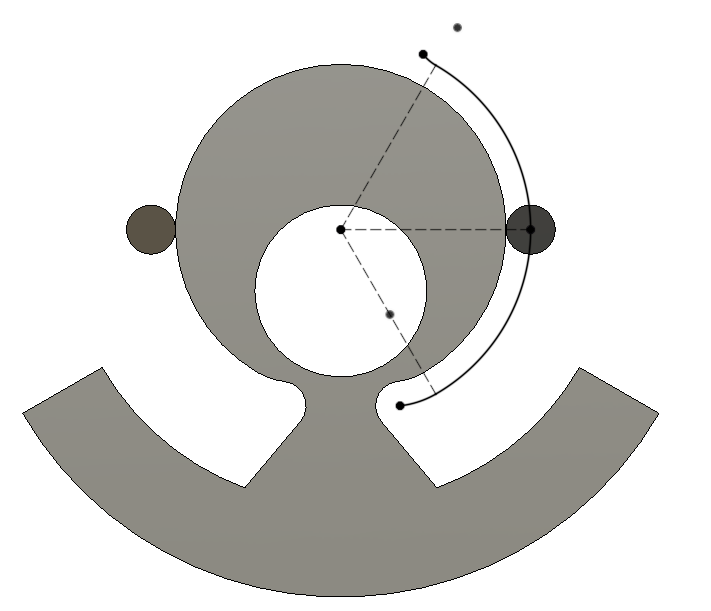
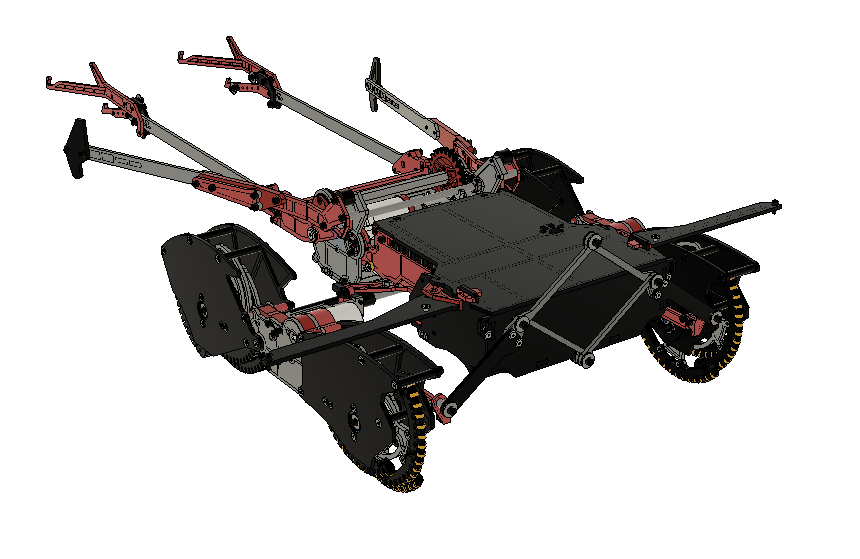
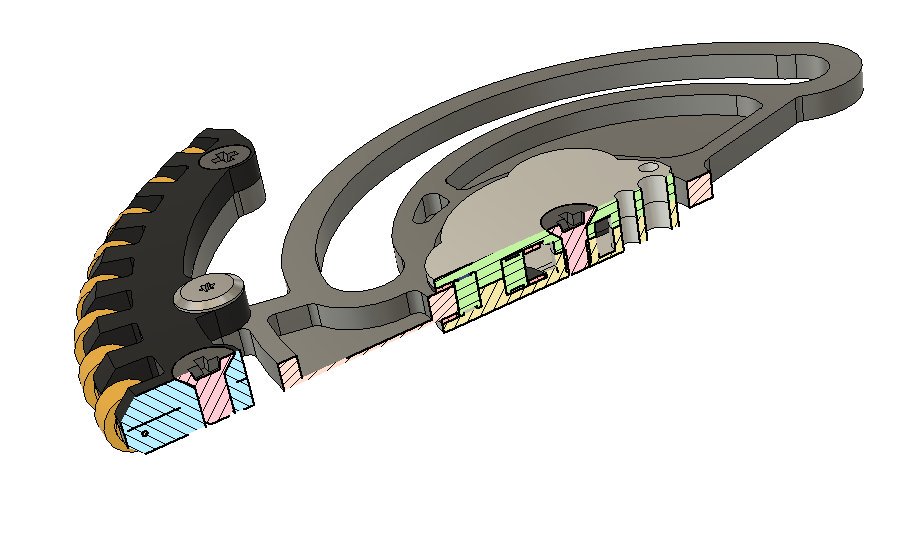
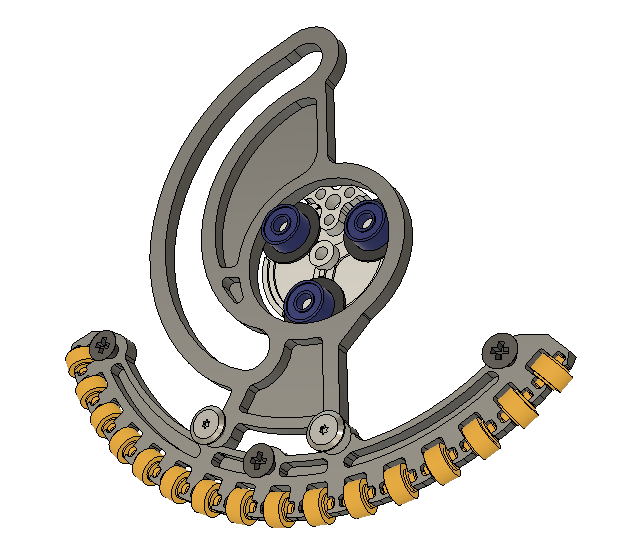
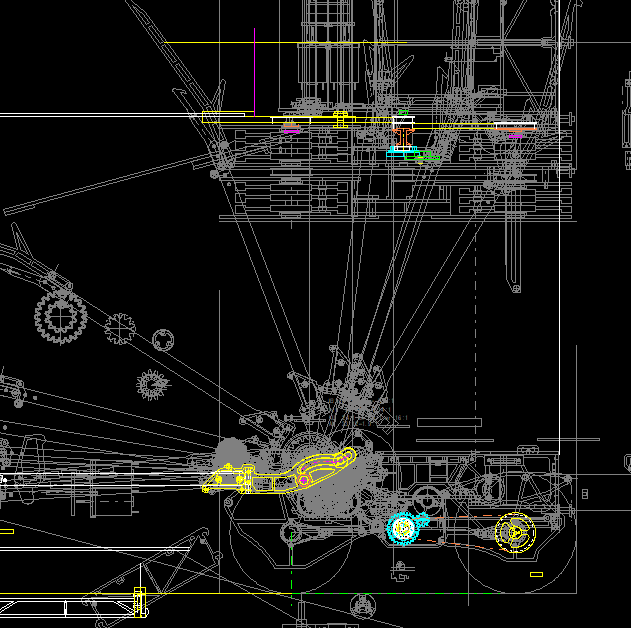
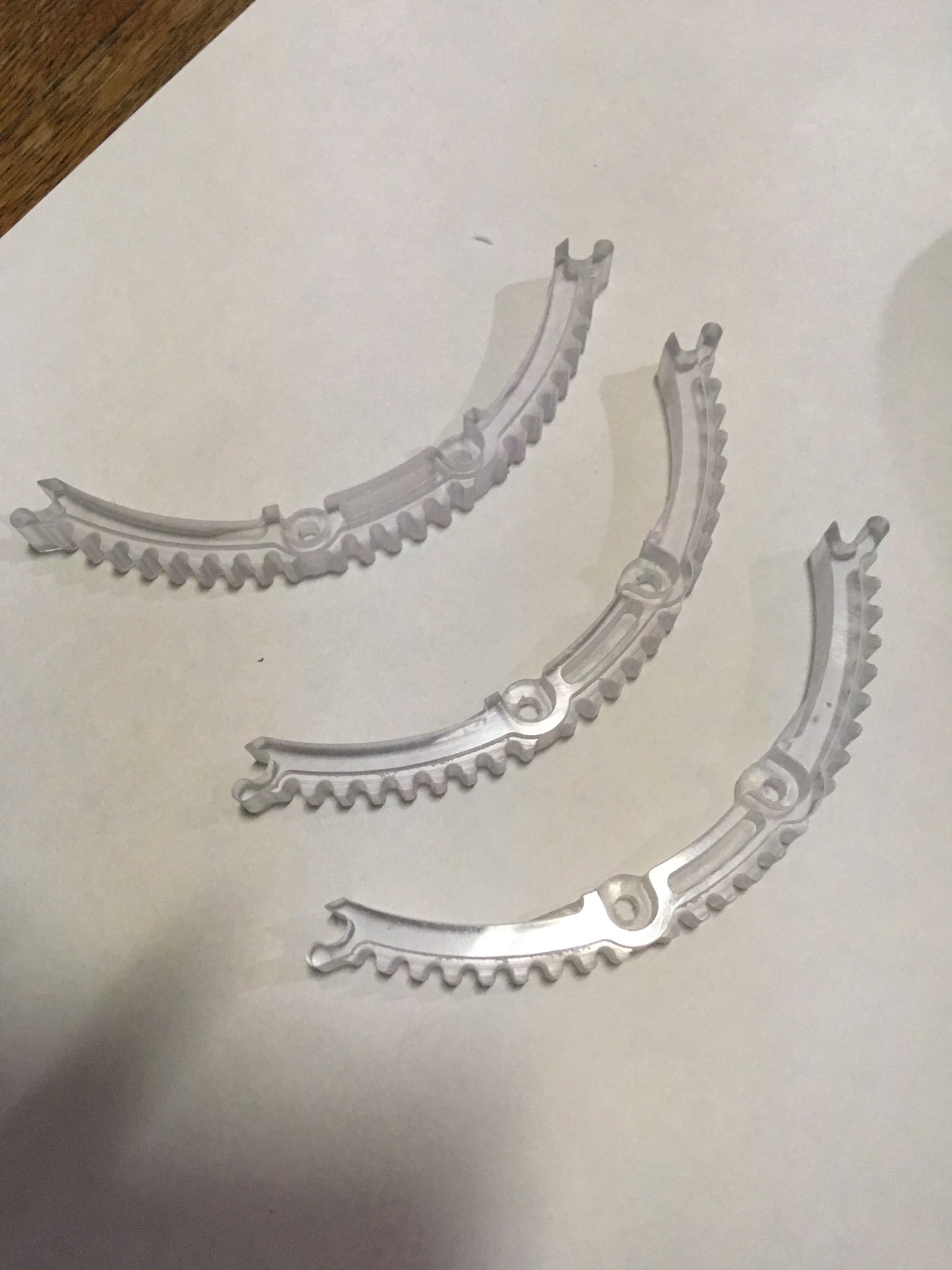
【かわロボ】スライダヘッケンリンクスライダヘッケンリンク(うしとら脚)の設計方法
VIDEO 【1. リンク比検討】 1.1 クランクとスライダの位置を決定 1.2 4節リンクを書く 1.3 可動域の確認 【2. スライダ疑似ヘッケンを作成】 2.1 スライダ溝を書く 2.2 形状を書く LINKS というものがありますので、参考までに。【3. うしとら(スライダ一本)】 3.1 スライダを修正する 3.2 形状を書く VIDEO おまけ: スライダ2本のうしとら脚を作る
シクロ
radenzaiku.blog.shinobi.jp://entry/339
2019-10-30T22:27:43+09:00
2019-10-30T22:27:43+09:00
かわロボ からっ風Schwarze 3Dデータ
何かの参考なればよいと思っています。https://1drv.ms/u/s!AvHExNVmsJPe3uxT2ImfR2l6cx5otg?e=Rc14Ta
シクロ
radenzaiku.blog.shinobi.jp://entry/338
2019-09-01T19:49:27+09:00
2019-09-01T19:49:27+09:00
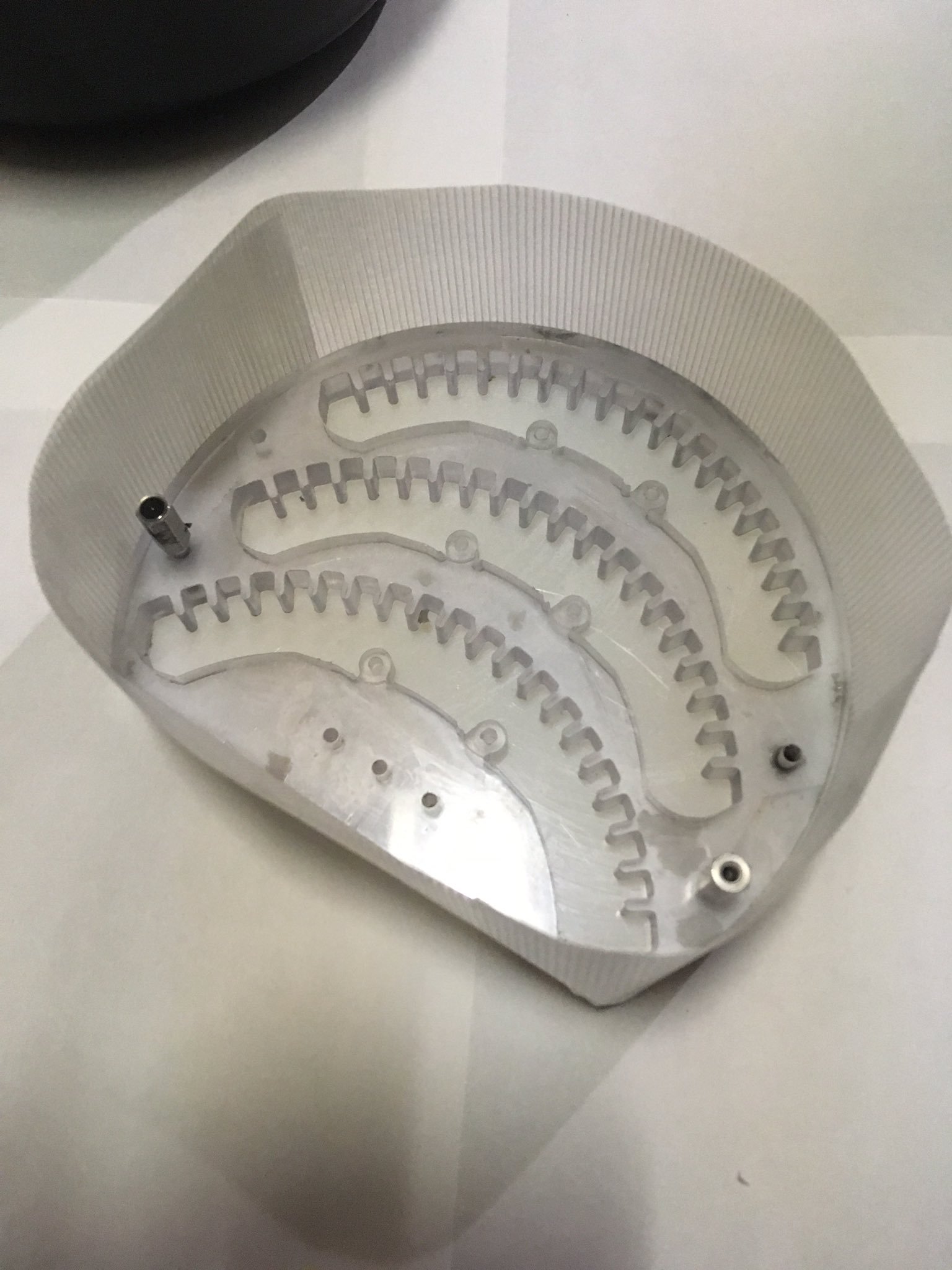
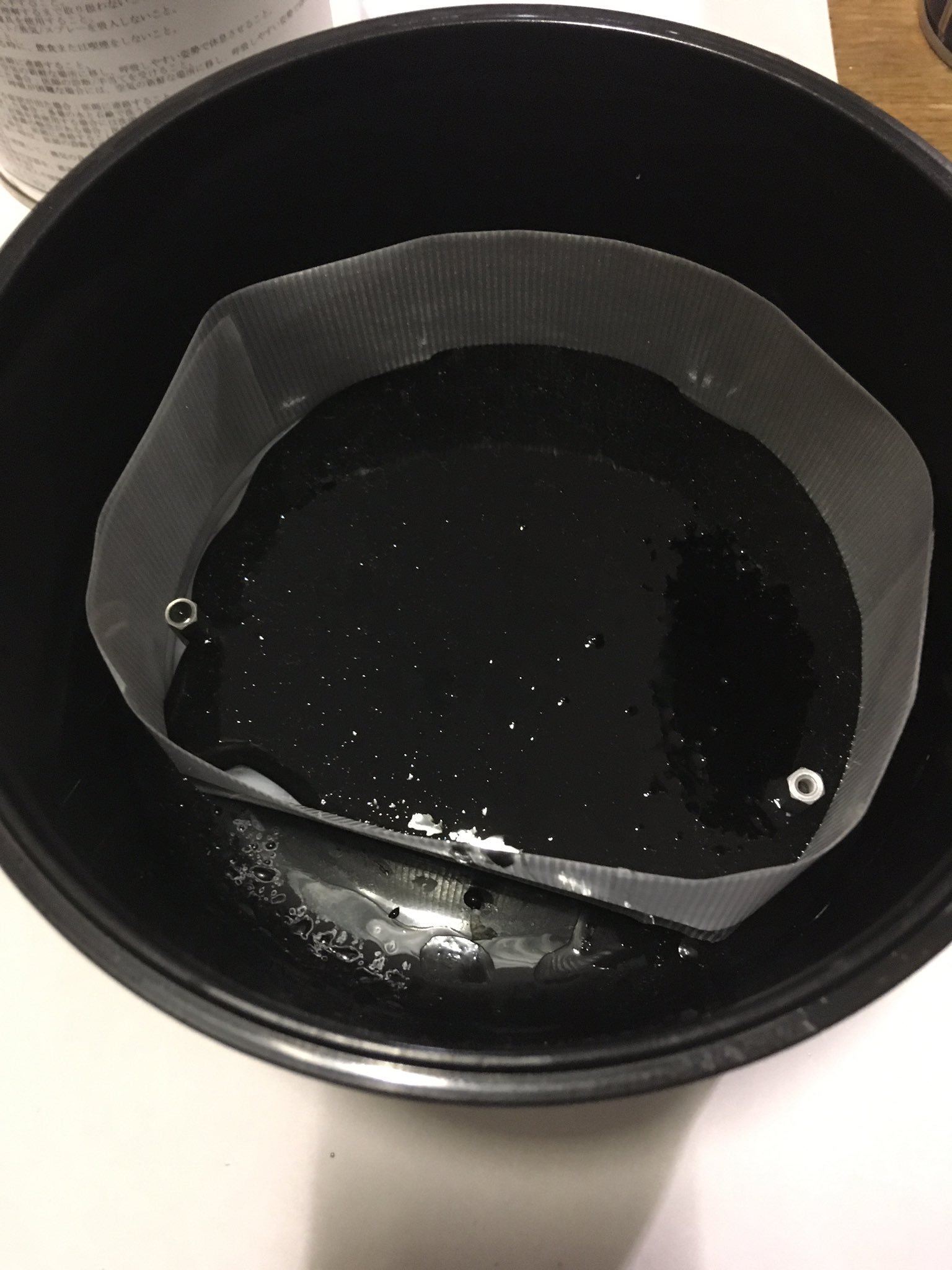
ウレタンゴムの注型
【製作手順】 ①型とインサート部品を切削 ②ウレタン樹脂を混ぜる ③型に液状ゴムを入れる ④減圧脱泡 ⑤効果まで放置 ⑥離型 ⑦仕上げと組み立て 【結果】 【使用したツール】 【注意点】
シクロ